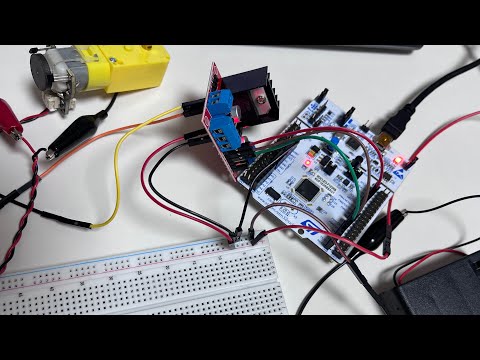
This project demonstrates DC motor control using an STM32F103 Nucleo board and the L298N motor driver.
Speed is controlled via PWM; forward, reverse, brake, and coast are implemented.
It’s a beginner-friendly example for embedded/robotics learning.
Pin Map (STM32 ↔ L298N)
- ENA → D12 (PA6, TIM3_CH1 PWM)
- IN1 → D5 (PB4)
- IN2 → D4 (PB5)
- OUT1/OUT2 → DC Motor terminals
- GND (L298N) ↔ GND (STM32)
- Battery + → L298N Vs(“12V”), Battery – → GND
Note: Remove the ENA jumper to enable external PWM from PA6.
이 프로젝트는 STM32F103 Nucleo 보드와 L298N 모터 드라이버로 DC 모터를 제어하는 예제입니다.
PWM으로 속도를 조절하고, 정/역회전·브레이크·코스트 기능을 구현했습니다.
임베디드/로보틱스 기초 학습에 적합한 예제입니다.
핀맵 (STM32 ↔ L298N)
- ENA → D12 (PA6, TIM3_CH1 PWM)
- IN1 → D5 (PB4)
- IN2 → D4 (PB5)
- OUT1/OUT2 → DC 모터 단자
- GND (L298N) ↔ GND (STM32)
- 배터리 + → L298N Vs(“12V”), 배터리 – → GND
참고: ENA 점퍼를 제거해야 PA6에서 외부 PWM으로 속도 제어가 됩니다.
motor_forward();
motor_set_duty(20); HAL_Delay(1500);
motor_set_duty(40); HAL_Delay(1500);
motor_coast(); motor_set_duty(0); HAL_Delay(1500);
motor_reverse();
motor_set_duty(25); HAL_Delay(2000);
motor_brake(); motor_set_duty(0); HAL_Delay(1000);