Home
Official MINIX sources - Automatically replicated from gerrit.minix3.org
Código do MINIX: https://github.com/Stichting-MINIX-Research-Foundation/minix
- Sobre
- Instalação
- Processos
- Gerenciamento de Memória
- Sistema de Arquivos
- Entrada e Saída (E/S)
- Referências
- Autores
MINIX 3 é um sistema operacional gratuito, de código aberto, projetado para ser altamente confiável, flexível e seguro. Ele é baseado em um pequeno micronúcleo rodando no modo kernel com o resto do sistema operacional funcionando como uma série de processos isolados, protegidos, no modo usuário. Ele é executado em CPUs x86 e ARM, é compatível com NetBSD e executa milhares de pacotes NetBSD.
Sua principais características são:
- Sistema operacional compatível com POSIX com um usuário NetBSD
- Código aberto, com licença BSD
- Funciona em PCs x86 e também em máquinas virtuais x86 (VMware, etc.)
- Funciona no ARM Cortex A8 (por exemplo, BeagleBoard XM, Bearglebones)
- Networking com TCP/IP
- Memória virtual
- Sistema de arquivos virtuais
- Cache de bloco unificado compartilhado por sistemas de memória virtual e arquivos
- Ligação dinâmica
- Pequena pegada de memória (Kernel é de 600 kB; o SO completo é de 25 MB)
Recursos específicos do MINIX
- Micronúcleo minúsculo que funciona no modo kernel
- A maioria do sistema operacional é executada em processos protegidos pelo modo usuário
- Cada driver de dispositivo é um processo separado do modo usuário
- Servidor de reencarnação pode recarregar drives com falha
Recursos de confiabilidade
- Tamanho reduzido do kernel
- Insertos são enjaulados
- O acesso à memória dos drivers é limitado
- Referências ruins de ponteiro nem sempre são fatais
- Loops infinitos nem sempre são fatais
- Os excessos de buffer nem sempre são fatais
- O acesso às chamadas de função do kernel é restrito
- O acesso aos portos de I/O é restrito
- A comunicação com componentes do SO é restrita
- Drivers mortos ou doentes podem ser reencarnados
- Interrupções e mensagens são integradas
Idiomas e Compiladores
- Idiomas: C, C++, clisp, mawk, Perl, Python, tcl, etc.
- Compiladores: gcc e clang/LLVM
- Compilação nativa (auto-hospedagem) em x86
- Compilação cruzada para x86 e ARM
Pacotes
- Conchas (por exemplo, bash, mksh, mudsh, pdksh, zsh)
- Editores (por exemplo, elvis, joe, jove, pico, uemacs, vim)
- Jogos (por exemplo, astutos, exchess, ioquake)
- Correio (por exemplo, buscar correio, getmail, vira-lata, thunderbird)
- Mais de 4000 outros pacotes NetBSD
Os sistemas operacionais monolíticos (por exemplo, Windows, Linux, BSD) têm milhões de linhas de código de kernel. Não há como tanto código ser corrigido. Em contraste, o MINIX 3 tem cerca de 4000 linhas de código de kernel executável. Acreditamos que este código pode ser feito bastante próximo ao bug free. Em sistemas operacionais monilíticos, os drivers de dispositivo residem no kernel. Isso significa que quando um novo periférico é instalado, código desconhecido e não confiável é inserido no kernel. Uma única linha de código ruim em um driver pode derrubar o sistema. Este design é fundamentalmente falho. No MINIX 3, cada driver de dispositivo é um processo separado do modo usuário. Os Drivers não podem executar instruções privilegiadas, alterar as tabelas de página, executar I/O ou escrever para memória absoluta. Eles têm que fazer chamadas de kernel para esses serviços e o kernel verifica cada chamada de autoridade.
Em sistemas operacionais monolíticos, um motorista pode escrever para qualquer palavra de memória e, portanto, acidentalmente destruir programas de usuários. No MINIX 3, quando um usuário espera dados do sistema de arquivos, ele constrói um descritor dizendo quem tem acesso e quais endereços. Em seguida, ele passa um índice para este descritor para o sistema de arquivos, que pode passá-lo para um driver. O sistema de arquivos ou driver pede então que o kernel escreva através do descritor, tornando impossível para eles escrever em endereços fora do buffer.
O diferenciamento de um ponteiro ruim dentro de um motorista vai travar o processo do motorista, mas não terá efeito no sistema como um todo. O servidor de reencarnação reiniciará o motorista acidentalmente automaticamente. Para alguns drivers (por exemplo, disco e rede) a recuperação é transparente aos processos do usuário. Para outros (por exemplo, áudio e impressora), o usuário pode notar. Em sistemas monolíticos, diferenciar um ponteiro ruim em um driver (kernel) normalmente leva a uma falha no sistema.
Se um driver entrar em um loop infinito, o agendador gradualmente diminuirá sua prioridade até que se torne o processo ocioso. Eventualmente, o servidor de reencarnação verá que ele não está respondendo a solicitação de status, então ele vai matar e reiniciar o driver de looping. Em um sistema monolítico, um motorista de looping trava o sistema.
O MINIX 3 usa mensagens de comprimento fixo para comunicação interna, o que elimina certos excessos de buffer e problemas de gerenciamento de buffer. Além disso, muitas explorações funcionam ultrapassando um buffer para enganar o programa para retornar de uma chamada de função usando um endereço de retorno empilhado substituído que aponta para o buffer invadido. Na MINIX 3, esse ataque não funciona porque as instruções e o espaço de dados são divididos e apenas o código no espaço de instrução (somente leitura) pode ser executado.
Os drivers do dispositivo obtêm serviços de kernel (como copiar dados para os espaços de endereço dos usuários) fazendo chamadas de kernel. O kernel MINIX 3 tem um mapa de bits para cada driver especificando quais chamadas ele está autorizado a fazer. Em sistemas monolíticos, cada motorista pode chamar todas as funções do kernel, autorizadas ou não.
O kernel também mantém uma tabela que diz quais portas de I/O cada driver pode acessar. Como resultado, um motorista só pode tocar em suas próprias portas de I/O. Em sistemas monolíticos, um driver de buggy pode acessar portas de I/O pertencentes a outro dispositivo. Nem todo motorista e servidor precisa se comunicar com todos os outros Drivers e servidores. Assim, um mapa de bits por processo determina para quais destinos cada processo pode enviar.
Um processo especial, chamado servidor de reencarnação, periodicamente pinga cada driver do dispositivo. Se o driver morrer ou não responder corretamente aos pings, o servidor de reencarnação substitui-o automaticamente por uma cópia nova. A detecção e substituição de drivers não funcionais é automática, sem qualquer ação do usuário necessária. Este recurso não funciona para drivers de disco no momento, mas na próxima versão o sistema será capaz de recuperar até mesmo drivers de disco, que serão sombreados em RAM. A recuperação do driver não afeta os processos de execução.
Quando ocorre uma interrupção, ela é convertida em um nível baixo para uma notificação enviada ao motorista apropriado. Se o motorista estiver esperando uma mensagem, ele recebe a interrupção imediatamente; caso contrário, ele recebe a notificação da próxima vez que fizer um RECEIVE para receber uma mensagem. Este esquema elimina interrupções aninhadas e facilita a programação do driver.
The impact of MINIX, por Tanenbaum.

Andrew Tanenbaum - MINIX 3: A Reliable and Secure Operating System - Codemotion Rome 2015, por Tanenbaum.

https://youtu.be/MG29rUtvNXg, por Tanenbaum.

A idéia inicial do Minix era ser um clone do Unix. Desta forma, os comandos básicos do Minix são os mesmos disponíveis em sistemas Unix como, por exemplo no Linux. Os dois principais editores de arquivos do Minix são o vi e o elle (ELLE Looks Like Emacs). Um manual de referência para o vi pode ser obtido em drumlin.
A seguir são mostrados alguns comandos Minix/UNIX necessários para começar a utilizar o sistema.
Criar um diretório:
$ mkdir diretorio
Acessar um diretório:
$ cd diretorio
Listar o conteúdo do diretório corrente:
$ ls -l
Apagar um arquivo:
$ rm arquivo
Compilar um programa:
$ cc hello.c
$ ./a.out
ou
$ cc -o hello hello.c
$ ./hello
Mudar as permissões de um arquivo:
# neste caso, adicionar a permissão de execução a um arquivo
$chmod +x arquivo
Executar um programa:
# em segundo plano (ou background)
$ ./programa &
# em primeiro plano (ou foreground)
$ ./programa
Executar um shell script:
$ sh script.sh
Exibe o estado e PID dos processos em execução:
$ ps -x
Mata um processo:
$ kill PID
Para mais informações:
- Lista completa dos manuais disponíveis do Minix 3: manpages
- Programming in the MINIX 3 Environment: doc
O código-fonte do Minix está localizado no diretório /usr/src. Após alguma modificação no código, é necessário recompilar e criar um novo kernel. Para compilar:
# cd /usr/src/tools
# make
Nesse ponto o kernel apenas foi compilado, agora é necessário gerar e instalar a imagem do kernel.
# cd /usr/src/tools
# make install
A imagem do kernel é armazenada no diretório /boot/image. Cada vez que um kernel é compilado, uma cópia da imagem é armazenada neste diretório. Quando o computador for reiniciado, o Minix irá carregar a versão mais nova (última kernel compilado).
# ls -a /boot/image
. .. 3.1.2a 3.1.2ar0 3.1.2ar1
Se forem realizadas modificações no gerenciamento de processos, também é necessário recompilar o comando ps para exibir corretamente os processos no novo ambiente.
# cd /usr/src/commands/ps
# make
# cp ps /usr/bin
# chown root /usr/bin/ps
# chmod 4755 /usr/bin/ps
Para que as alterações tenham efeito reinicie o sistema:
# shutdown -R
O básico do básico do editor VIM
O ambiente disponibilizado para a execução do Minix é uma console texto sem nenhum suporte a ambientes gráficos. Neste caso é necessário realizar as tarefas que habitualmente se está acostumado a fazer com ferramentas gráficas com seu equivalente em modo texto.
O VIM é um editor de texto. Ele é uma evolução de um outro editor bastante conhecido no mundo UNIX, o vi. Apesar de parecer rudimentar ele oferece uma série de funcionalidades bastante úteis. A grande vantagem de se conhecer um editor de textos como o vi é pode interagir com um sitema instalado quando a interface gráfica, por uma ou outra razão, não funciona. Normalmente, para repará-la, é necessário editar arquivos de configuração. Por tanto, o vi (e similares) resta como a única alternativa (Em caso de dúvida de sua utilidade, pergunte a um administrador de redes competente).
MINIX usa uma abordagem de microkernel, que implementa somente mecanismos mais básicos, como o de gerenciamento de processos, comunicação entre processos, escalonamento de processos e algumas system calls disponíveis aos servidores e drivers. Assim, temos no MINIX uma quantidade bem pequena de processos que são executados em modo de kernel, sendo grande parte do seu sistema executado em modo de usuário. Diferente do Linux que tendo um kernel monolítico realiza uma grande quantidade de funções em modo kernel. Para o MINIX então, o escalonador de processos de usuário tem uma importância extra já que terá que lidar com uma quantidade bem maior do que o escalonador de processos de kernel.
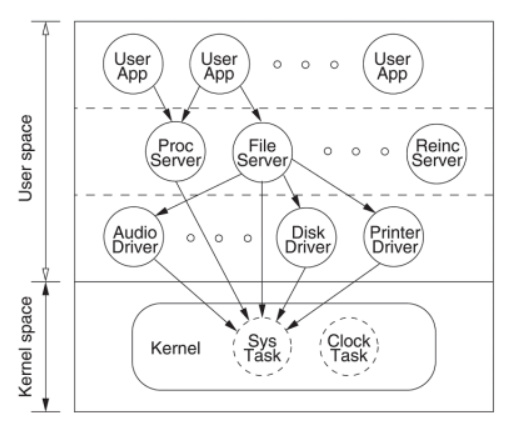
- Modelo em camadas do MINIX
Como visto na imagem acima, servidores e drivers são processos que rodam em nível de usuário, sendo assim possível que eles se comuniquem com o kernel e os demais processos de usuários se comunicarem apenas com os servidores. Com todo esse sistema, elevamos a confiabilidade do sistema, pois o kernel terá uma interface mais segura, sendo que terá menor quantidade de linhas e consequentemente reduzindo a taxa de possíveis bugs e evitaremos o kernel de erros de implementação devido os processos de usuários não terem acesso direto e sim por meio de comunicaçẽs entre processos (interprocess communication ou IPC)
Os processos no MINIX tem um modelo padrão de processos, em que estes podem criar subprocessos que por sua vez podem criar outros subprocessos, tendo assim uma árvore de processos.
Para trabalhar com processos, o Minix 3 oferta duas chamadas de sistemas principais, o fork e o exec. Falando mais sobre essas duas chamadas:
- Fork: Único modo para criar um novo processo
- Exec: Possibilita carregar um programa num processo já criado
A comunicação entre processos ocorre em três primitivas, send, receive e sendrec, sendo que cada uma recebe dois parâmetros ( um contendo o processo destino/origem e o segundo o local de memória que contém a informação da mensagem ). Em relação a troca de mensagem, o MINIX 3 utiliza uma técnica chamada rendezvous. Essa técnica permite que quando um processo A envia uma mensagem para o processo B, o processo A ficará bloqueado até que o processo B recebe a mensagem, sendo desnecessário o uso de buffer para controle de mensagem, pois todas as mensagens possuem um tamanho fixo e erros de estouro de buffer são prevenidos.
- No MINIX 3 o escalonador trabalha em um sistema de filas em multi-níveis, são dezesseis filas com prioridades definidas pelo sistema. A camada de prioridade mais baixa é utilizada em processos de segundo plano, sendo executados apenas quando não há processos de níveis de prioridades maiores, nos quais são os de camadas mais inferiores.
- Os processos de Serves possuem prioridade acima dos processos de usuários e os processos de Drivers possuem prioridade acima dos de Servers e os processos do Kernel ocupam a fila de maior prioridade. Os processos podem se mover entre as filas (filas essas que não são estáticas) utilizando o mesmo comando nice que contém nos sistemas UNIX
- Cada processo possui um quantum. Os processos de usuários possuem um valor de quantum baixo. Já os processos de Drivers e Servers tinham que ser executados até serem bloqueados (tempo real), mas por questão de segurança são processos preempíveis entretanto possuem um alto valor de quantum. O processo de clock fica responsável pelo controle do tempo de execução do processo.
- Para garantir a justiça dos processos, no qual o processo de mais baixa prioridade possa também ser executado, o MINIX 3 possui um sistema específico. Caso um processo A que utilizou todo o quantum for reescalonado para a CPU, fazendo que isso impeça que outros processos sejam executados, então A terá sua prioridade reduzida, fazendo assim que em algum momento todos os processos sejam executados. Caso A venha a utilizar todo seu quantum sem que isso impeça outros processos a serem executados, A terá sua prioridade elevada ao máximo permitido para o processo.
Dentro das filas o algoritmo de alternância obrigatória é utilizado, com uma pequena alteração. Se um processo, durante sua execução for bloqueado, quando este se tornar pronto novamente,será colocado no início da fila e irá utilizar o restante de seu quantum . Agora, se um processo utiliza todo o seu quantum, então será colocado no final da fila. O escalonador escolhe um processo da fila de mais alta prioridade para executar, se não tiver nenhum processo pronto na fila, então a fila de prioridade subsequente será analisada. Pela dependência dos processos Drivers com os Servers e deste último com os processos usuários, os processos Drivers e Servers, normalmente, ficam em estado bloqueado, permitindo a execução dos processos usuários.
O Gerenciador de Memória (GM) tem como função manter o controle de quais partes da memória estão em uso e quais partes não estão em uso, alocar e desalocar memória no ciclo de execução de processos, e gerenciar a troca entre memória principal e disco quando a memória é insuficiente para armazenar todos os processos. Na maioria dos sistemas (mas não no MINIX 3) o GM está no kernel.
Os sistemas de gerenciamento de memória podem ser divididos em duas classes: aqueles que movem processos entre a memória principal e o disco durante a execução (Swapping e Paging) e aqueles que não o fazem. No MINIX 3, o GM se encontra na última categoria citada, não sendo utilizado, por padrão, Swapping e Paging. No entanto, em contextos em que a memória física de um sistema seja limitada ao ponto de ser incapaz de armazenar os processos em memória, o Swapping pode ser ativado diretamento no código fonte do Minix 3.
O Gerenciador de Processos (GP) lida com as chamadas de sistema relacionadas ao gerenciamento de processos. Destes, alguns estão intimamente envolvidos com o gerenciamento de memória. As chamadas fork, exec e brk estão nesta categoria. O GP mantém uma lista de lacunas classificadas em ordem numérica de endereço de memória. Quando a memória é necessária, seja devido a um fork ou a uma chamada de sistema exec, ocorre a pesquisa na lista de lacunas, utilizando o algoritmo "First Fit", por uma lacuna grande o suficiente capaz de comportar o novo processo. Um processo que é colocado na memória permanece exatamente no mesmo lugar durante toda a sua execução - o processo nunca é movido para outro lugar na memória, tampouco sua área de memória alocada cresce ou diminui.
Outra característica que faz a implementação do gerenciamento de memória no MINIX 3 diferir de muitos outros sistemas operacionais é o fato do Gerenciador de Processos não fazer parte do kernel. Em vez disso, o GP é um processo que é executado no espaço do usuário (camada Servers) e se comunica com o kernel pelo mecanismo de mensagem padrão. A propriedade de mover GP para fora do kernel é um exemplo da separação entre política e mecanismo. As decisões sobre qual processo e onde um processo será colocado na memória (política) são feitas pelo GP. A configuração real dos mapas de memória para processos (mecanismo), por sua vez, é feita pela tarefa do sistema dentro do kernel. Essa divisão torna relativamente fácil alterar a política de gerenciamento de memória (algoritmos, etc.) sem ter que modificar as camadas mais baixas do sistema operacional.
No MINIX 3, os programas podem ser compilados para usar o espaço I (texto) e D (dados e pilha) separados, fazendo uso da memória de maneira mais eficiente e com maior complexidade quando comparado a versão original do MINIX, que usava os espaços I e D combinados em que todas as partes do processo (texto, dados e pilha) compartilham um bloco de memória que é alocado e liberado como um bloco.
Programas com espaço I e D separados aproveitam um modo aprimorado de gerenciamento de memória chamado shared text (texto compartilhado). Quando tal processo faz um fork, apenas a quantidade de memória necessária para uma cópia dos dados e da pilha do novo processo é alocada. Tanto o pai quanto o filho compartilham o código executável já em uso pelo pai. Quando esse processo executa um exec, a tabela de processos é pesquisada para ver se outro processo já está usando o código executável necessário. Se um for encontrado, a nova memória será alocada apenas para os dados e a pilha, e o texto já na memória será compartilhado.
O texto compartilhado, por outro lado, aumenta a complexidade no término de um processo. Quando um processo termina, esse sempre libera a memória ocupada por seus dados e pilha. Entretanto, um processo só libera a memória ocupada por seu segmento de texto depois que uma pesquisa na tabela de processos revelar que nenhum outro processo atual está compartilhando essa memória. Dessa forma, quando um processo termina esse pode não liberar toda a memória alocada a ele no início de sua execução.
No MINIX 3, a alocação de memória ocorre apenas em dois momentos:
- Execução de fork()
Faz uma cópia do processo que chama esta system call em uma das lacunas disponíveis; a quantidade de memória necessária para o filho é alocada. Para isto, chama a função de alocação de memória.
- Execução de exec()
Substitui a imagem de um processo por outra imagem. Devido à diferença de tamanho entre as imagens, a imagem atual é retirada da memória e então uma nova parcela de memória é alocada para a nova imagem.
A memória também é liberada sempre que um processo termina, seja completando sua execução ou sendo morto por um sinal.
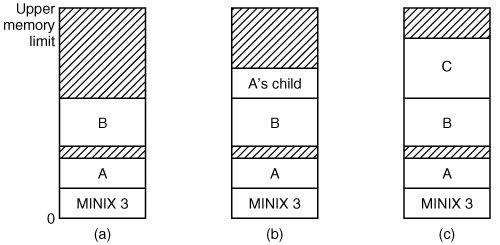 |
|---|
| Exemplo de alocação de memória para processo com espaços I e D combinados. (a) Originalmente. (b) Depois do fork. (c) Depois do filho chamar exec. As regiões sombreadas representam memória não utilizada |
Um processo executando armazena informações, porém esta informação é perdida quando o processo termina. Assim, a gravação destas informações na forma de arquivos garante que elas possam ser lidas e utilizadas posteriormente por outros processos. Ou seja, os arquivos são uma forma de armazenar as informações em disco, para utilização futura.
Arquivos comuns contém informações do usuário. Diretórios são arquivos de sistema para manter a estrutura do sistema de arquivos. Arquivos especiais de caracteres relacionam-se com a entrada/saída e são utilizados para modelar dispositivos de entrada/saída seriais como terminais, impressoras e redes.
Os arquivos mais comuns são ASCII e binários. Os arquivos ASCII possuem a vantagem de que podem ser exibidos e impressos como são, além de poderem ser editados com um editor de texto comum. Assim, quando vários programas utilizam arquivos ASCII, torna-se possível conectar a saída de um com a entrada de outro, como, por exemplo, em pipelines.
O sistema de arquivos no Minix funciona como um servidor de arquivos que é executado na própria máquina do usuário. Ele possui 39 tipos de mensagens para solicitar trabalho. Quando chega uma mensagem, é obtido o seu “tipo” para que seja chamado o procedimento adequado para este trabalho.
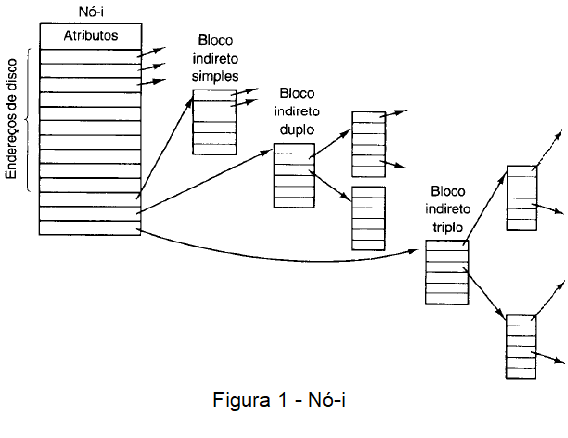
Este sistema de arquivos utiliza a estrutura de nó-i, que armazena os atributos e as localizações dos blocos de dados. Os primeiros endereços de disco ficam armazenados no próprio nó-i, assim, todas as informações de um arquivo pequeno estão diretamente no nó-i. Porém, quando há arquivos maiores, é necessário utilizar um dos endereços do nó-i para endereçar um “bloco indireto simples”. Caso o arquivo seja muito grande, também está disponível um “bloco indireto duplo” e um “triplo”, conforme mostra a Figura 1 a seguir.
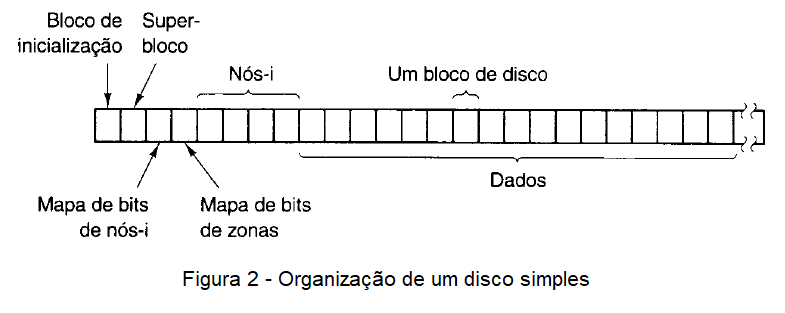
Cada sistema de arquivos começa com um bloco de inicialização, que contém o código a ser executado quando o computador é ligado. Além disso, existe o superbloco, que armazena as informações que descrevem a organização do sistema de arquivos, conforme mostra a Figura 2 a seguir.
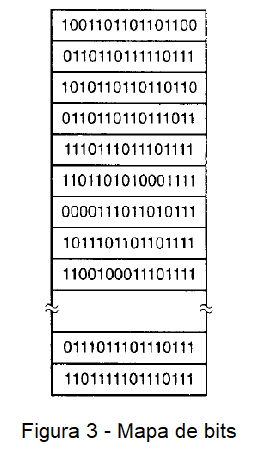
Utilizando um mapa de bits (Figura 3), o Minix controla quais nós-i e zonas estão livres. Se um arquivo é removido, o sistema procura o bloco do mapa de bits que corresponde ao nó-i e configura ele como 0. Quando um arquivo é criado, o sistema procura o primeiro nó-i livre nos blocos do mapa de bits. O superbloco possui um campo que aponta para o primeiro nó-i livre. Se nenhum nó-i estiver livre, é retornado valor 0.
Quando um arquivo é aberto, é necessário localizar seu nó-i para que ele seja carregado na tabela “inode” na memória, sendo removido quando o arquivo for fechado. As informações desta tabela permitem ao sistema de arquivos saber onde regravar o arquivo, caso seja modificado. A tabela também tem um contador, para guardar quantas vezes o arquivo for aberto, porém apenas uma cópia é mantida na memória. O nó-i também guarda informações sobre qual é o tipo do arquivo.
O sistema Minix usa um "cache" de blocos para melhorar o desempenho do seu sistema de arquivos. Este "cache" é feito com uma matriz de buffers, onde cada um possui um cabeçalho com ponteiros, contadores e sinalizadores. Os “buffers” que não estão sendo utilizados são colocados em uma lista duplamente encadeada, do mais para o menos recentemente utilizado. Também é utilizada uma tabela “hash” para saber se um bloco está ou não no "cache".
Quando o sistema de arquivos deseja acessar um bloco, ele chama o procedimento "get_block", juntamente com um número de dispositivo e um número de bloco. Se um buffer com o bloco é encontrado, incrementa-se o contador no cabeçalho, mostrando que ele está em uso, e retorna um ponteiro para ele. Se o bloco não é encontrado, pode-se utilizar o primeiro “buffer” livre. Se o bloco foi modificado, quando o sistema remover ele, deve gravá-lo no disco.
Quando o procedimento que estava usando o bloco termina, ele chama o procedimento "put_block", que libera o bloco (ou decrementa o contador, caso o bloco tenha sido aberto mais vezes). Se ele for removido, é gravado no disco. Se ocorrer a chamada de sistema SYNC, mesmo se o bloco não foi removido, mas foi modificado, ele é gravado no disco.
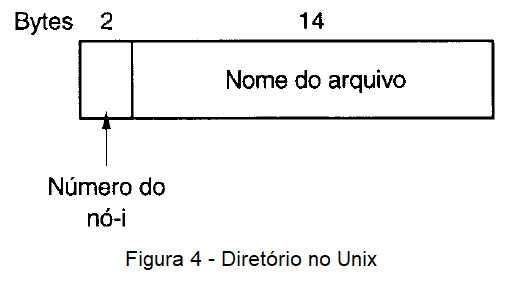
Um diretório no sistema Minix corresponde a um arquivo com entradas de 16 bytes, onde os dois primeiros formam o número do nó-i de 16 bits (1 byte = 8 bits, logo, 2 bytes = 16 bits) e os outros 14 bytes correspondem ao nome do arquivo.
Quando um arquivo é aberto, é retornado um descritor de arquivo (file descriptor) para ser utilizado pelas chamadas READ e WRITE. O número do descritor de arquivo (que é um dos campos da tabela de processos) indexa uma matriz, que é usada para localizar o arquivo correspondente ao descritor de arquivo informado.
Não podemos fazer uma entrada dessa matriz apontar diretamente para o nó-i do arquivo. É necessário utilizar uma nova tabela compartilhada, chamada "filp", onde estão todas as posições de arquivo (convém também colocar nesta tabela o ponteiro de nó-i). Assim, a matriz indexada pelo descritor de arquivo contém apenas um ponteiro para uma entrada na tabela "filp".
O sistema Minix também utiliza outra tabela, chamada "file_lock", para guardar o registro de todos os bloqueios. Cada uma das entradas da tabela indica se o arquivo está bloqueado para escrita ou leitura, o ponteiro para o nó-i do arquivo, o ID do processo que bloqueou, e os deslocamentos do primeiro e último bytes bloqueados.
Quando um processo tentar ler ou gravar em um "pipe" ("pipeline" ou canalização), o sistema de arquivos do Minix verifica o estado do "pipe" e, se a operação não pode ser feita, o sistema de arquivos registra os parâmetros da chamada de sistema na tabela de processos para reiniciar este processo quando for possível.
Em relação aos terminais e arquivos especiais de caracteres, o nó-i de cada arquivo especial possui dois números: o dispositivo principal, que indica a classe do dispositivo, por exemplo: disquete, terminal, disco rígido, disco de RAM; e o dispositivo secundário, que indica qual dispositivo deve ser usado.
Uma das principais funções de um sistema operacional é controlar dispositivos de entrada e saída em um computador, tratando erros, interceptando interrupções, fornecendo uma interface entre o dispositivo e o sistema e emitindo comandos para os dispositivos. Em geral, entradas são dados ou sinais recebidos pelo SO, e saídas são os dados ou sinais enviados por ele.
Um módulo de entrada e saída é uma entidade dentro de um computador responsável pelo controle de dispositivos externos, assim como pela transferência de dados entre tais dispositivos, a memória principal e a CPU. Assim, o módulo de E/S tem de ter uma interface interna ao computador (da CPU e da memória principal) e uma interface externa ao computador (para o dispositivo externo). As principais categorias de funções ou requisitos para um módulo de E/S são as seguintes:
- Temporização e controle
- Comunicação com o processador
- Comunicação com dispositivos
- Armazenamento temporário dos dados
- Detecção de erros
Durante qualquer período de tempo, a CPU pode se comunicar com um ou mais dispositivos externos de forma imprevisível, dependendo das necessidades da E/S. Os recursos internos, como a memória principal e o barramento de sistema, são partilhados entre um certo número de atividades incluindo o processamento de informação da E/S. Assim, a função de E/S inclui um requisito de temporização e controle, para controlar o fluxo de tráfego entre os recursos internos e os dispositivos externos.
A comunicação com a CPU envolve:
Descodificação de Comandos: O módulo de E/S aceita comandos da CPU. Estes comandos são geralmente enviados como sinais no barramento de controle.
Dados: Os dados são trocados entre a CPU e o módulo de E/S através do barramento de dados.
Relato de status: durante a comunicação com a CPU, é importante saber o estado atual em que o módulo E/S se encontra.
Detecção de Erros: Cada dispositivo de E/S possui um endereço, tal como acontece com cada palavra na memória. Assim, um módulo de E/S tem de reconhecer um único endereço para cada periférico sobre o seu controle. Em uma outra perspectiva, o módulo de E/S deve ser capaz de efetuar a comunicação com o dispositivo, envolvendo comandos.
Os dispositivos de E/S podem ser divididos, genericamente, em duas categorias: dispositivos de bloco e dispositivos de caractere.
Dispositivos de blocos, são todos os dispositivos que podem enviar/transmitir dados em blocos de tamanho fixo. Um exemplo de dispositivo de bloco, é o HD.
Dispositivos de caractere não utilizam estruturas de blocos nem posicionamento. No dispositivo de caractere, este recebe um fluxo de caracteres não endereçáveis.
As unidades de E/S geralmente consistem em um componente mecânico e um outro eletrônico. É possível separar essas duas partes para oferecer um projeto mais modular e genérico. Em computadores pessoais, esse frequentemente toma a forma de uma placa de circuito impresso.
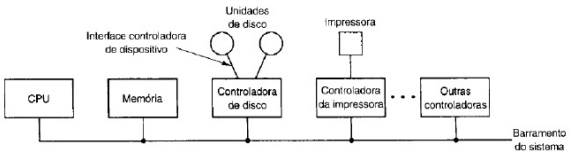
O trabalho do controlador é converter o fluxo serial de bits em um bloco de bytes e executar qualquer correção de erro necessária. O bloco de bytes tipicamente é montado, bit por bit, em um buffer dentro do controlador. Depois que sua soma de verificação foi verificada e o bloco foi declarado livre de erros, ele pode ser copiado para a memória principal. Cada controlador tem alguns registradores utilizados para a comunicação com a cpu. Em alguns computadores, esses registradores são parte do espaço normal de endereçamento de memória, e esse esquema é chamado E/S mapeada em memória.
Não importa se a CPU tem ou não E/S mapeada na memória, mas ela precisa endereçar os controladores dos dispositivos para poder trocar dados com eles. A CPU pode requisitar dados de um controlador de E/S, um byte por vez, o que é muito mal otimizado e desperdiça muito tempo, de modo que um esquema diferente (DMA) seja usado.
O controlador de DMA tem acesso ao barramento do sistema. Eles contêm vários registradores que podem ser lidos ou escritos na CPU, os quais possuem registrador de endereço de memória, registrador de controle e registrador de contador de bytes.
O controlador lê um bloco do dispositivo, bit a bit, até que todo bloco esteja no buffer do controlador. Em seguida, ele calcula a soma de verificação, para constatar de que não houve algum erro de leitura. Então, o controlador causa uma interrupção. Quando o S.O requisita dados, ele pode ler logo o bloco do disco a partir do buffer do controlador. Um bloco de byte ou uma palavra é lida no registrador do controlador e armazenada na memória principal.
Um conceito-chave no projeto de software de E/S é conhecido como independência de dispositivo. Isso significa que deve ser possível escrever programas que podem ler arquivos em um disquete, em um disco rígido ou em um CDROM, sem que seja necessário modificar os programas para cada tipo de dispositivo diferente. Outra questão importante para o software de E/S é o tratamento de erros. Em geral devem ser tratados o mais perto possível do hardware. Se a controladora descobrir um erro de leitura, ela deverá tentar corrigir o erro se puder. Se não puder, então o driver de dispositivo devera tratá-lo, talvez tentando simplesmente ler o bloco novamente.
Interrupções são uma realidade desagradável. Elas devem ser escondidas longe, no fundo das entranhas do sistema operacional, de modo que o mínimo possível do sistema saiba sobre elas. A melhor maneira de oculta-las é ter cada processo que inicia uma operação de E/S bloqueado até que a E/S tenha se completado e a interrupção tenha ocorrido. O processo pode se bloquear fazendo um down em um semáforo. Um wait em uma variável de condição ou um receive em uma mensagem, por exemplo. Quando as interrupções terminam, o procedimento de interrupção desbloqueia o processo que iniciou a E/S. Em alguns sistemas, ele faz um UP em um semáforo. Em outros, ele faz um sinal em uma variável de condição em um monitor. Em outros, ainda, ele envia uma mensagem para o processo bloqueador. Em todos casos, o efeito geral da interrupção será que um processo que anteriormente estava bloqueado agora será capaz de executar.
Os sistemas de computador estão repletos de recursos que podem ser utilizados apenas por um processo por vez. Ter dois processos simultaneamente gravando na impressora resulta em uma confusão. Portanto, todos os sistemas operacionais têm a capacidade de temporariamente conceder acesso exclusivo a certos recursos para um único processo.
Os recursos dividem-se em dois tipos: preemptivo e não preemptivo. Um recurso preemptivo é aquele que pode ser tirado de um processo sem causar nenhum problema, enquanto os não preemptivos não podem ser removidos do processo, pois causam prejuízo. A memória é um exemplo de um recurso preemptivo e uma CD-ROM é um exemplo de recurso não preemptivo.
No MINIX, drivers de entrada e saída são feitos com passagem de mensagens, de forma que rodem em modo usuário e se comuniquem com o kernel. Isso garante que um driver tenha limites quanto ao que pode fazer e aumente a estabilidade do sistema.
- http://minix3.org/doc/ (documentação oficial) [1]
- https://deinfo.uepg.br/~alunoso/2019/SO/MINIX/DISPOSITIVOS/site%20rea/#:~:text=Entrada%20e%20saida%20minix%20No%20Minix%2C%20drivers%20de,pode%20fazer%20e%20aumente%20a%20estabilidade%20do%20sistema. [2]
- Gabriel Henrique Silva Gontijo
- Leonardo de Oliveira Campos
- Lucas Ribeiro Silva
- Thomás Teixeira Pereira